
Su-25Tのトレーニングモード解説。今回は「Basic Flight Controls and Navigation」です。
ウェイポイントに沿って飛ぶ
今回は空中に表示されている緑色の四角の中を通っていくトレーニングになります。緑色の四角はウェイポイントと対応しているので、Su-25TのHUD上にも案内が出ています。
今回は夕方のミッションです、暗くて計器が見ずらい場合はライトを点灯します。(画像はライトが点灯した状態です。)[L]
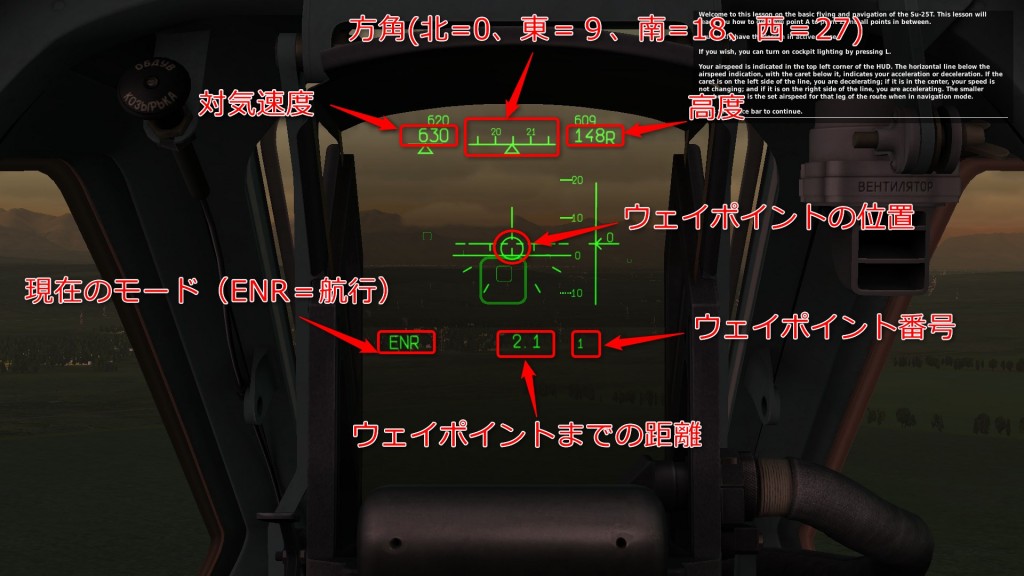
HUDは現在航行モードが表示されており、中に表示されているものの内容は以下の通りです。次のウェイポイントの位置が円で表示されており、円を機体の中心にあるように飛行すればウェイポイントへ向かっていることになります。
ウェイポイントを順調に通過していると、自動運転に関する説明が表示されます。今回はウェイポイントへ自動で向かう「Route Follow」モードに切り替えたら、トレーニング完了となります。[左Alt+6]
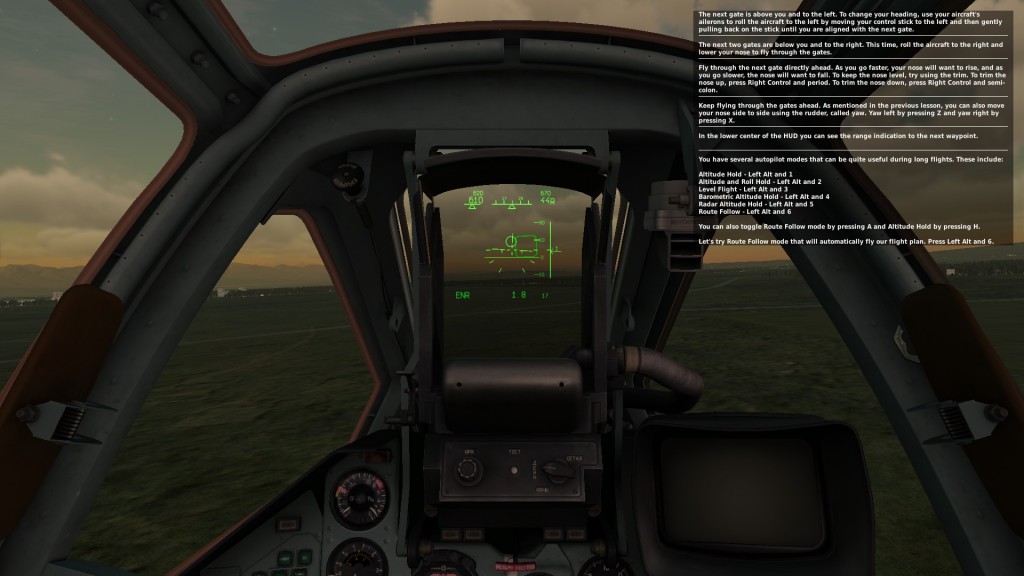
ちなみにそれ以外にも様々な条件で自動操縦させることが可能です。詳細は以下の表をご覧ください。
| 名称 | 操作 | 自動操縦の内容 |
|---|---|---|
| 高度維持 | 左Alt+1 | 現在の高度を維持する。 |
| 高度+ロール維持 | 左Alt+2 | 現在の高度とロール角を維持する。 |
| 水平飛行 | 左Alt+3 | 水平飛行する。 |
| 気圧高度維持 | 左Alt+4 | 現在の気圧高度を維持する。 |
| レーダー高度維持 | 左Alt+5 | 現在のレーダー高度を維持する。 |
| ウェイポイント追従 | 左Alt+6 | 次のウェイポイントを目指す。 |
| 解除 | 左Alt+9 | オートパイロットを解除する。 |
ちなみに気圧高度は、現在自分のいる場所の気圧から高度を算出しています。レーダー高度は地面にレーダー波をぶつけて地面との距離を測定しています。そのため、「レーダー高度維持」モードの場合、山などで地面の高さが上がると航空機も高く飛ぼうとします。逆に谷などで地面が低くなると、低く飛ぼうとします。
左Alt+9がオートパイロット解除となっていますが、操縦桿を大きく動かせば自動で解除されます。
今回は緑の四角をくぐるだけなので、それほど難しくはないでしょう。
どうしても通れない場合は、速度を遅めにしてチャレンジしてみてください。
